功能描述
CPM 内置比较器
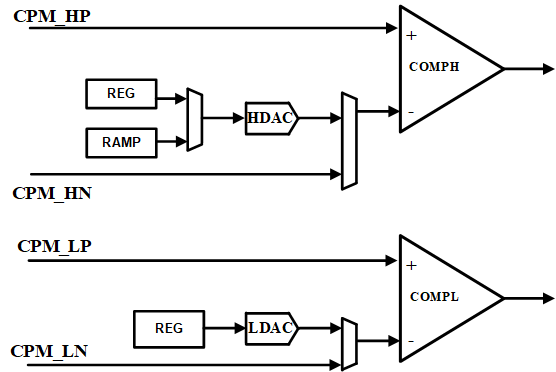
比较器 |
正端电压输入 |
负端电压输入 |
备注 |
|---|---|---|---|
高位比较器 ( |
外部输入信号 |
可选择外部输入信号 |
当比较器的正端输入电压大于负端输入电压时,比较器输出高电平,否则输出低电平。 |
低位比较器 ( |
外部输入信号 |
可选择外部输入信号 |
DAC 更新模式
高位和低位的比较器各自对配备了一个内置的 12-bit DAC,分别称为 HDAC 和 LDAC。HDAC 与 LDAC 规格基本相同。
以 HDAC 为例,通过配置输出寄存器 DACH_VALS,HDAC 会输出相应的电压 HDAC_OUT。输出电压的计算公式为:HDAC_OUT = VCC33_IO ×(DACH_VALS ÷ 4096),其中 VCC33_IO 是 IO 输入电压。
-
HDAC 的输出电压的更新,支持两种模式:寄存器更新和斜坡模块控制更新,如所示。在寄存器更新模式中,可以通过时钟信号 SYS_CLK 或同步信号 SYNC 触发读取影子寄存器更新。斜坡模块的更新方式可参考。
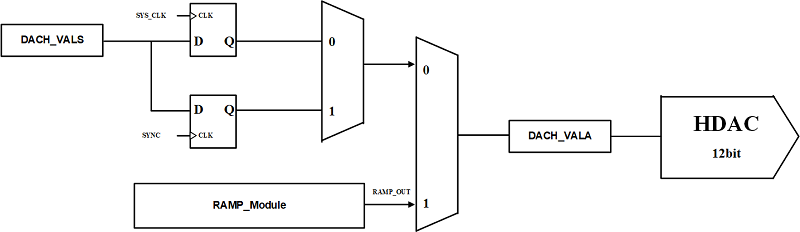
图 2. HDAC 结构框图 -
LDAC 的输出电压更新仅支持寄存器更新模式,不支持斜坡模块更新,寄存器的更新模式与 HDAC 的一致。
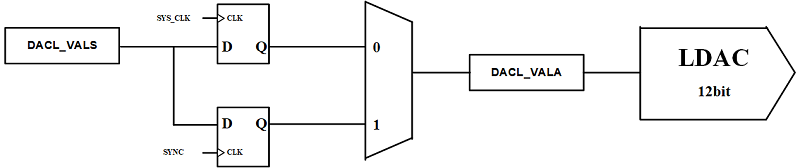
图 3. LDAC 结构框图
斜坡模块配置
斜坡模块 (RAMP_Module) 用于生成递减的斜坡信号 RAMP_OUT,控制 HDAC 的输出电压。CPM 可以利用此功能生成与输入电压相关的 PWM 信号。例如,在电源应用中,它可以用来控制反馈电压的 PWM 占空比。
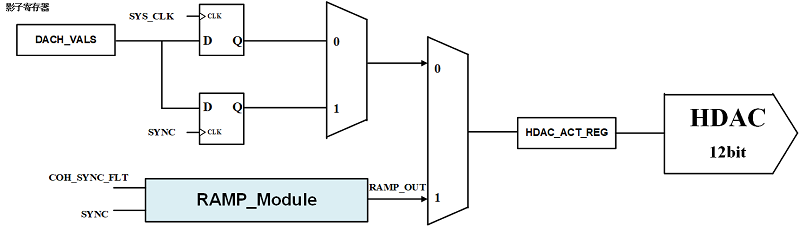
如所示,斜坡模块可以通过以下寄存器配置并结合 SYNC 信号触发,生成精确控制的递减斜坡信号 RAMP_OUT。
寄存器名称 |
功能描述 |
更新方式 |
更新触发信号 |
备注 |
|---|---|---|---|---|
RAMP_MAX_REFS |
设置斜坡信号的起始点。斜坡信号从该寄存器设置的数值开始递减。 |
影子更新 |
SYNC |
无单位,具体数值由应用决定 |
RAMP_DEC_VALS |
设置斜坡信号每次递减的幅度值。 |
影子更新 |
SYNC |
无单位,具体数值由应用决定 |
RAMP_DLYS |
设置斜坡模块启动的延迟时间。 |
影子更新 |
SYNC |
延迟时间为 SYS_CLK 周期数 |
- SYS_CLK:斜坡信号每次递减的时钟频率,由 CPM 模块提供,单位 Hz。
- 影子更新:表示寄存器的更新不会立即生效,而是在同步信号 SYNC 到来时,影子寄存器中的值才会被应用到实际寄存器中。
-
SYNC:同步信号,用于触发影子寄存器的更新。每次 SYNC 到来时,影子寄存器会更新,使用当前的 RAMP_MAX_REFS、RAMP_DEC_VALS 和 RAMP_DLYS 值来控制斜坡信号的生成。
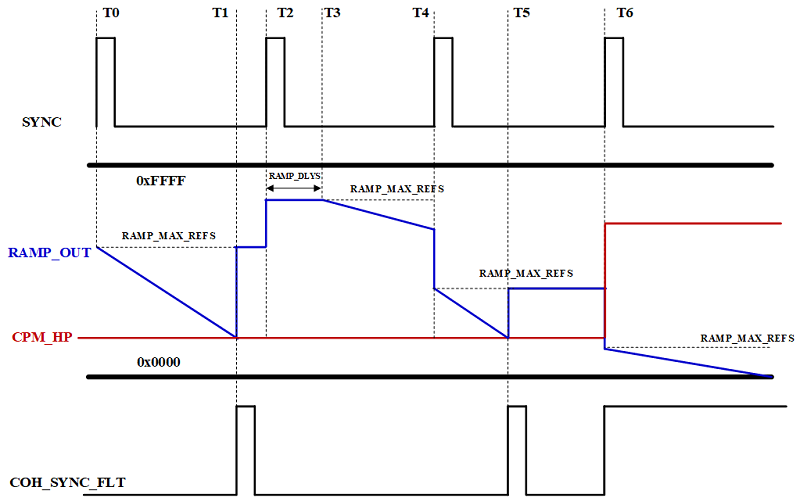
斜坡信号 RAMP_OUT 典型工作时序
以下是斜坡信号 RAMP_OUT 的典型工作时序示例:
时间点 |
事件描述 |
|---|---|
T0 |
SYNC 信号到来,触发 RAMP_MAX_REFS、RAMP_DEC_VALS 和 RAMP_DLYS
影子寄存器更新,斜坡模块启动 (RAMP_DLYS = 0)。 由于 RAMP_DLYS 设置为 0,RAMP_OUT 从当前的 RAMP_MAX_REFS 开始递减。 |
T1 |
RAMP_OUT 控制 HDAC 的输出低于比较器阈值 CPM_HP,CPMH 的输出比较信号 COH_SYNC_FLT
发生翻转,斜坡模块停止递减并将输出恢复到当前的 RAMP_MAX_REFS 值。 HDAC 的输出也回到起始值,比较器的输出再次反转。 |
T2 |
SYNC 信号再次到来,影子寄存器更新,斜坡模块会延迟启动(RAMP_DLYS > 0)。延迟时间为 (RAMP_DLYS × TSYS_CLK ) 。 |
T3 |
斜坡模块启动,RAMP_OUT 开始递减。 在 T3 ~ T4 时间段,RAMP_OUT 尚未低于 CPM_HP 的电压水平,比较器未发生反转,斜坡信号仍在持续递减。 |
T4 |
SYNC 信号到来,影子寄存器更新,斜坡模块继续递减。 |
T5 |
比较器信号翻转,斜坡模块停止并恢复到 RAMP_MAX_REFS 起始值。 |
T6 |
输入信号 CPM_HP 跳变,导致比较器信号反转。SYNC 信号同时到来,斜坡模块继续按照新一轮寄存器值递减。 |
数字输出控制
CPM 模块的数字输出控制逻辑用于处理比较器输出信号,经过多级逻辑操作后,生成可用于 PWM 保护、中断触发或 GPIO 输出的信号。高位比较器和低位比较器的处理逻辑相同。
数字输出控制逻辑流程
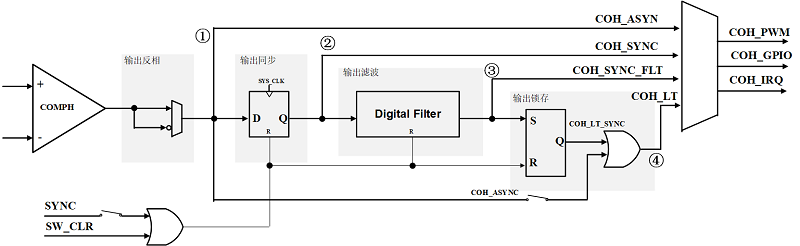
以高位比较器的输出为例,数字输出控制逻辑分为四级操作,依次如下:
- 输出异步,此时的信号为异步信号 COH_ASYNC,该通路可以支持输出反相功能。
- 输出同步,采用 SYS_CLK 对比较器的输出信号进行同步,得到同步信号 COH_SYNC。
- 输出滤波,采用数字滤波器,对上级信号进行数字滤波,得到信号 COH_SYNC_FLT。
- 输出锁存,采用 SR 锁存器,锁存输出结果后与 COH_ASYNC 进行 OR 逻辑,得到信号 COH_LT。
数字滤波器
数字滤波器通过采样窗口内的数据判断是否翻转输出信号,等效如下的 C 代码实现:
//当输出为 0 时,检查采样窗口中 1 的数量
if (FILTER_OUTPUT == 0) {
//当采样窗口里数据为 1 的数量大于阈值,则输出信号翻转
if (Num_1s_in_SAMPWIN >= THRESH) {
FILTER_OUTPUT = 1;
}
}
//当输出为 1 时,检查采样窗口中 0 的数量
else {
//当采样窗口里数据为 0 的数量大于阈值,则输出信号翻转
if (Num_0s_in_SAMPWIN >= THRESH) {
FILTER_OUTPUT = 0;
}
}
参数名称 |
描述 |
|---|---|
|
滤波器的当前输出状态 (0 或 1) |
|
采样窗口中值为 1 的数量 |
|
采样窗口中值为 0 的数量 |
|
翻转输出的阈值 例如:采样窗口中 1 或 0 的数量超过该值时翻转输出 |
中断信号
通过寄存器 COH_IRQ_EN/ COL_IRQ_EN 使能,可选择比较器的输出信号 COH_IRQ、COL_IRQ 触发 CPM 中断的产生。
通过配置寄存器的模式位,可以选择具体的触发模式:
-
电平模式:支持高/ 低电平触发中断
当比较器输出信号保持高电平或低电平时,将持续触发中断。
-
边沿模式:支持上升沿/ 下降沿/ 双沿触发中断
在信号由低到高或由高到低的瞬间触发一次中断。