SPL 阶段
ArtInChip 平台上的 SPL (Secondary Program Loader) 是第一级引导程序 (FSBL, First Stage Boot Loader), 同时也是第二级程序加载器。
BROM → SPL → U-Boot → Kernel
SPL 运行在 SRAM 中,其最重要的任务有两个:
-
完成 DDR,并且使能 Cache
-
加载和验证 U-Boot
在一些启动速度优化的方案中,也可以直接从 SPL 启动 Kernel。 本章节描述不同启动介质的 SPL 处理流程,以及安全启动的相关处理。
RISCV SPL
SPL BSS 的配置
CONFIG_SPL_TEXT_BASE=0x103100
CONFIG_SPL_SIZE_LIMIT=0x10000
#define CONFIG_SPL_MAX_SIZE (CONFIG_SPL_SIZE_LIMIT)
#define CONFIG_SPL_STACK (D21x_SRAM_BASE + D21x_SRAM_SIZE)
#define CONFIG_SPL_BSS_START_ADDR (CONFIG_SPL_TEXT_BASE + CONFIG_SPL_MAX_SIZE)
#define CONFIG_SPL_BSS_MAX_SIZE 0x00002000 /* 8 KiB */
即 BSS 从 0x113100 开始,后续还有 SPL STACK 的空间,HEAP 的空间。
对于 spl.aic 文件,在 spl.bin 的后面还存放着其它的资源数据,如果该数据需要在 SPL 阶段使用, 则需要注意,在 SPL 运行时,资源数据的区域与 BSS 区域不能重合,不然会有数据错误。
启动流程
理解 SPL 的启动流程,关键是设备树,设备驱动模型。关于设备树,请查看设备树相关章节,设备驱动模型的介绍如下:
uboot 设备驱动框架模型
uclass <–> uclass_driver <–> udevice <–> driver <–> hardware
uclass 表示管理某一个类别下的所有 device;
uclass_driver 表示对应 uclass 的 ops 集合。
uboot 设备驱动框架搭建的过程
-
创建 udevice;
-
应用 uclass 如果没有则匹配生成 uclass;
-
udevice 和 uclass 绑定;
-
uclass_driver 和 uclass 绑定;
-
driver 和 udevice 绑定;
-
device_probe 执行,会触发 driver 调用 driver 函数。
SPL RISCV 的启动整体流程
_start // arch/riscv/cpu/start.S
|-> save_boot_params // arch/riscv/mach-artinchip/lowlevel_init.S
| // BROM 跳转到 SPL 执行的时候,传递了一些参数,这里首先需要将这些参数保存起来
|
|-> csrw MODE_PREFIX(ie), zero // Disable irq
|-> li t1, CONFIG_SPL_STACK // 设置 sp 寄存器
|-> jal board_init_f_alloc_reserve // common/init/board_init.c
| // 预留初始 HEAP 的空间
| // 预留 GD 全局变量的空间
|
|-> jal board_init_f_init_reserve
| // common/init/board_init.c, init gd area
| // 此时 gd 在 SPL STACK 中。
|
|-> jal icache_enable // arch/riscv/cpu/c906/cache.c 使能指令高速缓存
|-> jal dcache_enable // 使能数据高速缓存
|
|-> jal debug_uart_init // drivers/serial/ns16550.c
| // 初始化调试串口,如果使能
|
|-> board_init_f // arch/riscv/lib/spl.c
| |-> spl_early_init() // common/spl/spl.c
| |-> spl_common_init(setup_malloc = true) // common/spl/spl.c
| |-> fdtdec_setup(); // lib/fdtdec.c 获取 dtb 的地址,并验证合法性
| | // 只对带有“u-boot,dm-pre-reloc”属性节点进行解析,初始化驱动模型的根节点,扫描设备树创建 udevice,uclass
| |-> dm_init_and_scan(!CONFIG_IS_ENABLED(OF_PLATDATA)); // drivers/core/root.c
| |-> dm_init(); // driver model, initiate virtual root driver
| | |-> INIT_LIST_HEAD(DM_UCLASS_ROOT_NON_CONST); // 初始化 uclass 链表
| | |-> device_bind_by_name()
| | | | // drivers/core/device.c
| | | | // 加载"root_driver"name, gd->dm_root
| | | |-> lists_driver_lookup_name()
| | | | |-> ll_entry_start(struct driver, driver); // 获取 table 起始位置
| | | | |-> ll_entry_count(struct driver, driver); // 获取 table 长度
| | | | // drivers/core/lists.c
| | | | // 采用 U_BOOT_DRIVER(name) 声明的 driver,从 table 中获取 struct driver 数据
| | | |
| | | | // 初始化 udevice 与对应的 uclass,driver 绑定
| | | |-> device_bind_common(); // drivers/core/device.c
| | | |-> uclass_get(&uc)
| | | | |-> uclass_find(id); // 判断对应的 uclass 是否存在
| | | | |-> uclass_add(id, ucp); // 如果不存在就创建
| | | | |-> lists_uclass_lookup(id); // 获取 driver 结构体数据
| | | |-> uclass_bind_device(dev) // uclass 绑定 udevice drivers/core/uclass.c
| | | |-> drv->bind(dev) // driver 绑定 udevice
| | | |-> parent->driver->child_post_bind(dev)
| | | |-> uc->uc_drv->post_bind(dev)
| | |
| | |-> device_probe(gd->dm_root) // drivers/core/device.c
| | |-> uclass_resolve_seq(dev) // 通过 dtb 解析获得设备差异数据
| | |-> uclass_pre_probe_device(dev); // probe 前操作
| | |-> drv->probe(dev); // 执行 driver 的 probe 操作
| | |-> uclass_post_probe_device(dev); // probe 后操作
| |
| |-> dm_scan(pre_reloc_only);
| | // 扫描和绑定由 U_BOOT_DEVICE 声明的驱动。
| | // 一般用在 SPL OF_PLATDATA 的情况
| |-> dm_scan_plat(pre_reloc_only);
| | |-> lists_bind_drivers(DM_ROOT_NON_CONST, pre_reloc_only);
| | |-> bind_drivers_pass(parent, pre_reloc_only);
| | |-> device_bind_by_name();
| |
| |-> dm_extended_scan(pre_reloc_only);
| | |-> dm_scan_fdt(pre_reloc_only); // 扫描设备树并与设备驱动建立联系
| | | |-> dm_scan_fdt_node(gd->dm_root, ofnode_root(), pre_reloc_only); //扫描设备树并绑定 root 节点下的设备
| | | |-> ofnode_first_subnode(parent_node) // 获取设备树的第一个子节点
| | | |-> ofnode_next_subnode(node) // 遍历所有的子节点
| | | |-> ofnode_is_enabled(node) // 判断设备树的子节点是否使能
| | | |-> lists_bind_fdt(parent, node, NULL, pre_reloc_only); // 绑定设备树节点,创建新的 udevicd drivers/core/lists.c
| | | |-> ofnode_get_property(node, "compatible", &compat_length); // 获取 compatible
| | | |-> driver_check_compatible() // 和 driver 比较 compatible 值
| | | |-> device_bind_with_driver_data() // 创建一个设备并绑定到 driver drivers/core/device.c
| | | |-> device_bind_common() // 创建初始化 udevice 与对应的 uclass,driver 绑定
| | |
| | | // /chosen /clocks /firmware 一些节点本身不是设备,但包含一些设备,遍历其包含的设备
| | |-> dm_scan_fdt_ofnode_path(nodes[i], pre_reloc_only);
| | |-> ofnode_path(path); // 找到节点下包含的设备
| | |-> dm_scan_fdt_node(gd->dm_root, node, pre_reloc_only);
| |
| |-> dm_scan_other(pre_reloc_only);
| | // 扫描使用者自定义的节点 nothing
|
|-> spl_clear_bss // arch/riscv/cpu/start.S
|-> spl_relocate_stack_gd // 切换 stack 和 gd 到 dram 空间
|-> board_init_r() // common/spl/spl.c
|-> spl_set_bd() // board data info
| // 设置完 bd 之后,才能 enable d-cache
|-> mem_malloc_init()
| // init heap
| // - CONFIG_SYS_SPL_MALLOC_START
| // - CONFIG_SYS_SPL_MALLOC_SIZE>
|
|-> spl_init
| |-> spl_common_init
| // 由于前面已经调用了 spl_early_init,
| // 这里不再调用 spl_common_init
|
|-> timer_init(); // lib/time.c nothing
|-> spl_board_init(); // arch/riscv/mach-artinchip/spl.c nothing
|
|-> initr_watchdog // enable watchdog,如果使能
|-> dram_init_banksize(); // 如果使能
|-> board_boot_order() // common/spl/spl.c
| |-> spl_boot_device(); // arch/riscv/mach-artinchip/spl.c
| |-> aic_get_boot_device(); // arch/riscv/mach-artinchip/boot_param.c
| // 从 boot param 中获取启动介质信息
|
|-> boot_from_devices(spl_boot_list)
| |-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针
| | // 这里可能是各种介质的 load image 函数
| | // SPL_LOAD_IMAGE_METHOD() 定义的 Loader
| | // 可能是 MMC/SPI/BROM/...
| |
| |-> spl_load_image // 以 emmc 启动为例
| |-> spl_mmc_load_image // common/spl/spl_mmc.c
| |-> spl_mmc_load // 具体可看后面的流程
|
|-> spl_perform_fixups // vendor hook,用于修改 tree 传递参数
|-> spl_board_prepare_for_boot // vendor hook, 可不实现
|-> jump_to_image_no_args // 跳转到 boot 执行MMC 加载
SPL 从 MMC 加载 U-Boot 的处理过程。程序编码的时候,针对 MMC 设备添加了对应的加载程序支持,如 spl_mmc.c 中,通过使用宏 SPL_LOAD_IMAGE_METHOD(“MMC1”, 0, BOOT_DEVICE_MMC1, spl_mmc_load_image);
将 spl_mmc_load_image 函数添加到 .u_boot_list_2_spl_image_loader_* 段。
board_init_r() // common/spl/spl.c
|-> boot_from_devices(spl_boot_list)
|-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针
// 这里可能是各种介质的 load image 函数
// SPL_LOAD_IMAGE_METHOD() 定义的 Loader
// 可能是 MMC/SPI/BROM/...找到 SPL MMC Loader 之后,从项目配置的指定 Sector 读取数据。
CONFIG_SYS_MMCSD_RAW_MODE_U_BOOT_SECTOR
boot_from_devices(spl_boot_list); // common/spl/spl.c
|-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针
| // 此处通过遍历固件的 .u_boot_list_2_spl_image_loader_* 段
| // 找到当前支持的存储介质,然后逐个尝试
|
|-> spl_load_image(loader);
|-> loader->load_image(spl_image, &bootdev);
spl_mmc_load_image(); // common/spl/spl_mmc.c
|-> spl_mmc_load();
|
+-------------+
|
spl_mmc_load();
|-> spl_mmc_find_device(&mmc, bootdev->boot_device);
| |-> mmc_initialize
| |-> mmc_probe
| |-> uclass_get(UCLASS_MMC, &uc)
| |-> device_probe(dev)
| |-> uclass_resolve_seq(dev)
| |-> pinctrl_select_state(dev, "default")
| | |-> pinctrl_select_state_full(dev, "default")
| | | |-> state = dev_read_stringlist_search(dev,
| | | | "pinctrl-names", "default");
| | | |-> dev_read_prop(dev, propname, &size)
| | | | // snprintf(propname, sizeof(propname),
| | | | // "pinctrl-%d", state)
| | | |
| | | |-> pinctrl_config_one(config)
| | | |-> ops = pinctrl_get_ops(pctldev)
| | | |-> ops->set_state(pctldev, config)
| | |
| | |-> pinctrl_select_state_simple(dev)
| | |-> uclass_get_device_by_seq(UCLASS_PINCTRL, 0, &pctldev)
| | |-> ops=pinctrl_get_ops(pctldev)
| | | // #define pinctrl_get_ops(dev)
| | | // ((struct pinctrl_ops *)(dev)->driver->ops)
| | |
| | |-> ops->set_state_simple(pctldev, dev)
| |
| |-> power_domain_on(&powerdomain)
| |-> uclass_pre_probe_device(dev)
| |-> clk_set_defaults(dev)
| | |-> clk_set_default_parents(dev)
| | |-> clk_set_default_rates(dev)
| |
| |-> drv->probe(dev)
| |-> uclass_post_probe_device(dev)
|
|-> mmc_init
|-> boot_mode=spl_boot_mode(bootdev->boot_device)
|-> mmc_load_image_raw_sector
|-> header=spl_get_load_buffer(-sizeof(*header), bd->blksz)
| // header 位于 addr 偏移-head_size 处
|
|-> blk_dread(bd, sector, 1, header)
| // 读取一个 sector 的 u-boot image header
|
|-> mmc_load_legacy(spl_image, mmc, sector, header)
| |-> spl_parse_image_header(spl_image, header)
| // 解析 header 信息,得到 boot 的 addr 和 size 信息
|
|-> blk_dread(bd, sector, cnt, load_addr)
// 读取完整的 image,包括 header,注意 addr 是向前偏移过的地址SPI NAND 加载
官方版本的 SPL 并不支持从 SPI NAND 启动,ArtInChip 增加了从 SPI NAND 的 MTD 分区 和 UBI 加载 U-Boot 的支持。
#ifdef CONFIG_SPL_UBI
/* Use priorty 0 to override other SPI device when this device is enabled. */
SPL_LOAD_IMAGE_METHOD("SPINAND_UBI", 0, BOOT_DEVICE_SPI, spl_ubi_load_image);
#else
SPL_LOAD_IMAGE_METHOD("SPINAND", 0, BOOT_DEVICE_SPI, spl_spi_nand_load_image);
#endifU-Boot 保存在 MTD 分区
- 在 SPL 初始化过程中,通过 boot_from_devices(spl_boot_list) 函数调用,检查当前项目
所支持的 SPL 读取的存储介质类型,然后依次检查是否存在对应的程序加载器:
board_init_r() // common/spl/spl.c |-> boot_from_devices(spl_boot_list) |-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针 // 这里可能是各种介质的 load image 函数 // SPL_LOAD_IMAGE_METHOD() 定义的 Loader // 可能是 MMC/SPI/BROM/... - 找到 SPL SPI NAND Loader
之后,从项目配置的指定位置读取数据。CONFIG_SYS_SPI_NAND_U_BOOT_OFFS
boot_from_devices(spl_boot_list); // common/spl/spl.c |-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针 | // 此处通过遍历固件的 .u_boot_list_2_spl_image_loader_* 段 | // 找到当前使能的存储介质驱动,然后逐个尝试 | |-> spl_load_image(loader); |-> loader->load_image(spl_image, &bootdev); spl_spi_nand_load_image(); // arch/arm/mach-artinchip/spl_spi_nand.c |-> spl_spi_nand_init(); | |-> uclass_first_device(UCLASS_MTD, &dev); // drivers/core/uclass.c | |-> mtd_probe(dev); | |-> get_mtd_device(NULL, 0); |-> spl_get_load_buffer(-sizeof(*header), sizeof(*header)); |-> spl_spi_nand_read(); | // 读取头信息 |-> spl_parse_image_header(spl_image, header); |-> spl_spi_nand_read();// arch/arm/mach-artinchip/spl_spi_nand.c | // 读取整个 U-Boot 镜像 |-> mtd_block_isbad(mtd, off); | // 跳过坏块 |-> mtd_read(); // drivers/mtd/mtdcore.c
U-Boot 保存在 UBI 中
- 在 SPL 初始化过程中,通过 boot_from_devices(spl_boot_list) 函数调用,检查当前项目
所支持的 SPL 读取的存储介质类型,然后依次检查是否存在对应的程序加载器:
board_init_r() // common/spl/spl.c |-> boot_from_devices(spl_boot_list) |-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针 // 这里可能是各种介质的 load image 函数 // SPL_LOAD_IMAGE_METHOD() 定义的 Loader // 可能是 MMC/SPI/BROM/... - 找到 SPL SPI NAND UBI Loader 之后,从项目配置的指定位置读取数据:
-
CONFIG_SPL_UBI_INFO_ADDR
-
CONFIG_SPL_UBI_PEB_OFFSET
-
CONFIG_SPL_UBI_VID_OFFSET
-
CONFIG_SPL_UBI_LEB_START
或者从指定 Volume 中读取
CONFIG_SPL_UBI_LOAD_MONITOR_VOLNAMEboot_from_devices(spl_boot_list); // common/spl/spl.c |-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针 | // 此处通过遍历固件的 .u_boot_list_2_spl_image_loader_* 段 | // 找到当前支持的存储介质,然后逐个尝试 | |-> spl_load_image(loader); |-> loader->load_image(spl_image, &bootdev); spl_ubi_load_image(); // arch/arm/mach-artinchip/spl_spi_nand.c |-> spl_spi_nand_init(); | |-> uclass_first_device(UCLASS_MTD, &dev); // drivers/core/uclass.c | |-> mtd_probe(dev); | |-> get_mtd_device(NULL, 0); |-> spl_get_load_buffer(-sizeof(*header), sizeof(*header)); |-> ubispl_load_volumes(&info, volumes, 1); // drivers/mtd/ubispl/ubispl.c | | // 读取整个 U-Boot 镜像的内容 | |-> ipl_scan(ubi); | |-> ipl_load(ubi, lv->vol_id, lv->load_addr); | | // drivers/mtd/ubispl/ubispl.c | |-> ubi_load_block(ubi, laddr, vi, vol_id, lnum, last); | |-> ubi_io_is_bad(ubi, pnum); // drivers/mtd/ubi/io.c | | // drivers/mtd/ubispl/ubispl.c | |-> ubi_io_read(ubi, laddr, pnum, ubi->leb_start, dlen); | | // drivers/mtd/ubispl/ubispl.c | |-> ubi->read(pnum + ubi->peb_offset, from, len, buf); | nand_spl_read_block(pnum + ubi->peb_offset, | | from, len, buf); | | // arch/arm/mach-artinchip/spl_spi_nand.c | |-> mtd_read(); | |-> spl_parse_image_header(spl_image, header); -
读数 SPI NAND 数据的流程
mtd_read(); // drivers/mtd/mtdcore.c
|-> mtd->_read_oob(mtd, from, &ops);
part_read_oob(mtd, from, ops); // drivers/mtd/mtdpart.c
spinand_mtd_read(mtd, from, &ops); // drivers/mtd/nand/spi/core.c
|-> spinand_read_page(spinand, &iter.req, enable_ecc);
|-> spinand_load_page_op(spinand, req);
| |-> spi_mem_exec_op(spinand->slave, &op);
| | // drivers/spi/spi-mem-nodm.c
| |-> spi_xfer(slave, op_len * 8, op_buf, NULL, flag);
|
|-> spinand_read_from_cache_op(spinand, req);
|-> spi_mem_exec_op(spinand->slave, &op);
|-> spi_xfer(slave, op_len * 8, op_buf, NULL, flag);SPI NOR 加载
common/spl/spl_spi.c 中通过宏注册了 SPI NOR 的程序加载器:
SPL_LOAD_IMAGE_METHOD("SPI",1,BOOT_DEVICE_SPI,spl_spi_load_image);-
在 SPL 初始化过程中,通过 boot_from_devices(spl_boot_list) 函数调用,检查当前项目所支持的 SPL 读取的存储介质类型,然后依次检查是否存在对应的程序加载器。
board_init_r() // common/spl/spl.c |-> boot_from_devices(spl_boot_list) |-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针 // 这里可能是各种介质的 load image 函数 // SPL_LOAD_IMAGE_METHOD() 定义的 Loader // 可能是 MMC/SPI/BROM/... -
找到 SPL SPI NOR Loader 之后,从项目配置的指定位置读取数据。
SPI NOR 加载器需要编译时配置所用的 SPI 信息:-
CONFIG_SF_DEFAULT_BUS
-
CONFIG_SF_DEFAULT_CS
-
CONFIG_SF_DEFAULT_SPEED
-
CONFIG_SF_DEFAULT_MODE
-
-
通过下面的配置指定读取数据的位置:
CONFIG_SYS_SPI_U_BOOT_OFFS:boot_from_devices(spl_boot_list); // common/spl/spl.c |-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针 | // 此处通过遍历固件的 .u_boot_list_2_spl_image_loader_* 段 | // 找到当前支持的存储介质,然后逐个尝试 | |-> spl_load_image(loader); |-> loader->load_image(spl_image, &bootdev); spl_spi_load_image(); // common/spl/spl_spi.c |-> spi_flash_probe(); |-> spl_get_load_buffer(-sizeof(*header), sizeof(*header)); |-> spi_flash_read(header); |-> spl_parse_image_header(); |-> spi_flash_read(); |-> spi_flash_read_dm(flash->dev, offset, len, buf); |-> sf_get_ops(dev)->read(dev, offset, len, buf); spi_flash_std_read(dev, offset, len, buf); | // drivers/mtd/spi/sf_probe.c |-> mtd->_read(mtd, offset, len, &retlen, buf); spi_flash_mtd_read(mtd, offset, len, &retlen, buf); // drivers/mtd/spi/sf_mtd.c
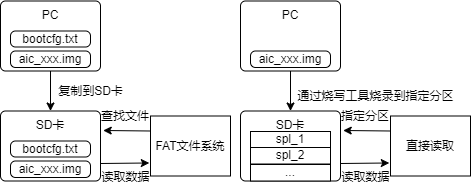
SDFAT32 加载
SDFAT32 启动方式更为简单,不需要专业的烧录工具进行烧写,只需要将镜像文件复制到 SD 卡即可。
- 使用下列宏参数将 spl_mmc_load_image 函数添加到
.u_boot_list_2_spl_image_loader_*
段:
SPL_LOAD_IMAGE_METHOD(“MMC2”, 0, BOOT_DEVICE_MMC2, spl_mmc_load_image); -
在
board_init_r(gd_t *dummy1, ulong dummy2)函数中,调用 boot_from_devices 从 device 中选择启动介质,通过启动介质选择对应的加载程序,获取启动镜像:// source/uboot-2021.10/common/spl/spl.c boot_from_devices | // 这里会传递一个空的 info 结构体,以及传递一个启动设备的列表,这里为第一个值为 BOOT_DEVICE_MMC2 |->spl_ll_find_loader(bootdev); // bootdev=BOOT_DEVICE_MMC2,根据 bootdev 查找 spl_load_image 指针 |->spl_load_image(spl_image, loader); // 这里已经获取到对应启动设备的加载器 |->loader->load_image(spl_image, &bootdev); // 调用加载器的实现函数 spl_mmc_load_image -
进入到对应启动介质的加载程序中,通过 NAME 指定启动镜像配置文件,从中获取镜像在 SD 卡中的实际地址:
// source/uboot-2021.10/common/spl/spl_fat.c spl_mmc_load_image |->spl_mmc_load(spl_image, bootdev,...); // 这里 CONFIG_SPL_FS_LOAD_PAYLOAD_NAME=bootcfg.txt |->spl_mmc_find_device(&mmc, bootdev->boot_device); // 先找 mmc 设备 |->mmc_init(mmc); // 再进行 mmc 设备的初始化 |->spl_mmc_boot_mode(bootdev->boot_device); | // 选择启动方式,这里获取到的是 FS 方式启动 |->spl_mmc_do_fs_boot(spl_image, mmc, filename); // filename 为 bootcfg.txt |->aic_spl_load_image_fat(spl_image, mmc_get_blk_desc(mmc), filename); |->blk_dread(cur_dev, 0, 1, header); | // 读取 SD 卡的第 0 块。 |->check_identifier(header); // 检测 SD 卡的分区类型选择启动方式 |->load_image_from_mbr_part_fat32(header, filename); // 以 MBR 分区格式去加载镜像 |->blk_dread(cur_dev, part.lba_start, 1, header); | // 读取 LBA 起始地址 |->check_identifier(header); // 检测 SD 卡分区类型是否为 FAT32 |->load_image_from_raw_volume_fat32(part.lba_start, header, filename); | // 获取 BPB 内容 |->load_image_file(header, filename); |->aic_fat_read_file(filename, (u8 *)header, 0, 1024, &actread); | // 查找并读取 txt 文件内容到 header 地址 |->boot_cfg_parse_file((u8 *)header, actread, "boot1", ...); | // 解析 txt 信息,获取 image 名称,解析 Boot 的大小,以及相对 | // image 文件中 Boot 所在的偏移地址 |->aic_fat_read_file(imgname, header, ...); //读取 image 文件的 header |->spl_parse_image_header(spl_image, header); | // 解析 Boot 中前 64 个字节内容,设置加载地址 |->aic_fat_read_file(imgname, (u8 *)spl_image->load_addr, ...); | // 读取 Boot 镜像到 spl_image->load_addr 地址。 |->board_init_r(); // 跳转回 board_init_r()继续执行 -
读取 Boot 镜像到内存后,跳转回 board_init_r()继续执行:
// source/uboot-2021.10/common/spl/spl.c board_init_r() |->spl_perform_fixups // vendor hook,用于修改 tree 传递参数 |->jump_to_image_no_args(&spl_image); |->image_entry = (image_entry_withargs_t)spl_image->entry_point; // 获取 Boot 加载地址 |->set_boot_device(boot_param, aic_get_boot_device()); // 设置启动介质 |->set_boot_reason(boot_param, aic_get_boot_reason()); // 设置启动原因(冷启动或者热启动) |->image_entry(boot_param, cur_tm); // 进入 Boot 执行,并传递一些参数
签名校验
U-Boot 官方的代码,SPL 支持 FIT image 的签名。如果固件使用其它格式, 需要自行添加相应的校验支持。
FIT Image 签名校验
mmc_load_image_raw_sector(); // common/spl/spl_mmc.c
|-> spl_get_load_buffer(-sizeof(*header), bd->blksz);
|-> blk_dread(bd, sector, 1, header);
|-> image_get_magic(header) == FDT_MAGIC // 判断是否为 FIT Image
|-> spl_load_simple_fit(spl_image, &load, sector, header); // common/spl/spl_fit.c
|-> info->read(info, sector, sectors, fit);
| h_spl_load_read(info, sector, sectors, fit); // common/spl/spl_mmc.c
| |-> blk_dread(mmc_get_blk_desc(mmc), sector, count, buf);
|-> node = spl_fit_get_image_node(fit, images, "loadables", 0);
|-> spl_load_fit_image(info, sector, fit, base_offset, node,
| spl_image); // common/spl/spl_fit.c
|-> // 中间加载过程
|-> fit_image_verify_with_data(fit, node, src, length);
| // common/image-fit.c
|-> fit_image_check_sig(fit, noffset, data, size, -1, &err_msg);
| // common/image-sig.c
|-> fit_image_setup_verify();
|-> fit_image_hash_get_value();
|-> info.crypto->verify(&info, ®ion, 1,
fit_value, fit_value_len);
rsa_verify(&info, ®ion, 1,
fit_value, fit_value_len);
// lib/rsa/rsa-verify.c此处的 rsa-verify 可以对接到硬件 CE,具体可看 UCLASS_MOD_EXP 的相关内容。 如果没有硬件加速器的实现,则使用软件进行计算。
AIC Image 签名校验
制作 SD 量产卡时,由于 Updater U-Boot 固件需要使用 AIC Image 格式, 因此 SD 量产卡启动过程中,SPL-Updater 需要解析 AIC Image 格式。
为了平台的安全,BROM 所执行的程序必须经过安全验证。BROM 只支持 AIC Image 格式的固件,因此这里 Updater U-Boot 必须使用 AIC Image 格式。
-
通过 USB 升级时,通过 BROM 将 Updater U-Boot 下载到 DRAM,并且由 BROM 执行。
-
将 Updater U-Boot 烧录到 SD 量产卡,从 SD 卡启动到 Updater U-Boot 进入升级程序。
返回 BROM
在 USB 升级的应用中,主机通过 USB 下载 SPL 到 SRAM,并且由 BROM 跳转执行,SPL 代码对 DDR 初始化结束之后需要返回到 BROM 中继续执行下载其它数据的操作。
这种应用场景中,将返回 BROM 看做是从 BROM 中加载数据,因此返回 BROM 被实现为一个程序加载器。
common/spl/spl_bootrom.c 中通过注册 BOOT_DEVICE_BOOTROM 来实现。
SPL_LOAD_IMAGE_METHOD("BOOTROM", 0, BOOT_DEVICE_BOOTROM, spl_return_to_bootrom);board_init_r() // common/spl/spl.c
|-> board_boot_order()
| |-> spl_boot_device(); // arch/arm/mach-artinchip/spl.c
| |-> aic_get_boot_device(); // arch/arm/mach-artinchip/boot_param.c
| // 从 boot param 中获取启动介质信息,
| // 此处返回 BD_BOOTROM
|
|-> boot_from_devices(spl_boot_list)
|-> spl_ll_find_loader() // 根据 device 找到 spl_load_image 指针
| // 这里可能是各种介质的 load image 函数
| // SPL_LOAD_IMAGE_METHOD() 定义的 Loader
| // 此处找到的是 BOOT_DEVICE_BOOTROM
|
|-> spl_return_to_bootrom();// common/spl/spl_bootrom.c
|-> board_return_to_bootrom();
// arch/arm/mach-artinchip/lowlevel_init.S启动参数描述了 BROM 跳转 SPL 运行时所传递的参数,SPL 在开始运行时已经保存了 BROM 跳转时的所有重要寄存器,因此在 board_return_to_bootrom() 可以通过恢复现场,实现返回。